Notebook source code:
notebooks/14_real_world_applications__hand_poses_analysis_in_kendall_shape_space.ipynb
Run it yourself on binder
![]()
Classifying hands poses with Kendall shape spaces#
Lead author: Nina Miolane.
In this tutorial, we show how to use geomstats to perform a shape data analysis. Specifically, we aim to study the difference between two groups of data:
hand poses that correspond to the action “Grab”,
hand poses heads that correspond to the action “Expand”.
We wish to investigate if there is a difference in these two groups.
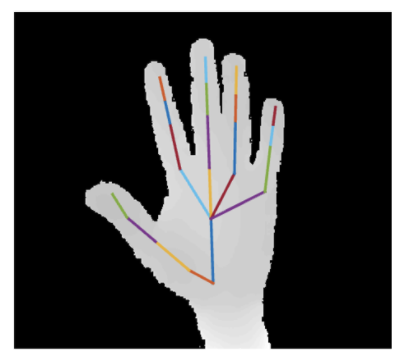
The hand poses are represented as the coordinates of 22 joints in 3D:
In [1]:
import matplotlib.pyplot as plt
import geomstats.backend as gs
import geomstats.datasets.utils as data_utils
from geomstats.geometry.pre_shape import PreShapeSpace
INFO: Using numpy backend
Hands shapes#
Load the dataset of hand poses, where a hand is represented as a set of 22 landmarks - the hands joints - in 3D.
The hand poses represent two different hand poses:
Label 0: hand is in the position “Grab”
Label 1: hand is in the position “Expand”
This is a subset of the SHREC 2017 dataset [SWVGLF2017].
We load the dataset of landmarks’ sets and corresponding labels.
In [2]:
hands, labels, bone_list = data_utils.load_hands()
In [3]:
print(hands.shape)
print(labels)
(52, 22, 3)
[0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1]
We extract two hands, one corresponding to the “Grab” pose, and the other to the “Expand” pose.
In [4]:
label_to_str = {0: "Grab", 1: "Expand"}
label_to_color = {
0: (102 / 255, 178 / 255, 255 / 255, 1.0),
1: (255 / 255, 178 / 255, 102 / 255, 1.0),
}
first_grab_hand = hands[labels == 0][0]
first_expand_hand = hands[labels == 1][0]
We implement a function to plot one hand in 3D.
In [5]:
def plot_hand(hand, bone_list):
"""Plot hand."""
plt.figure()
ax = plt.axes(projection="3d")
x = hand[:, 0]
y = hand[:, 1]
z = hand[:, 2]
ax.scatter(x, y, z, s=40)
for bone in bone_list:
start_bone_idx = bone[0]
end_bone_idx = bone[1]
ax.plot(
xs=[x[start_bone_idx], x[end_bone_idx]],
ys=[y[start_bone_idx], y[end_bone_idx]],
zs=[z[start_bone_idx], z[end_bone_idx]],
)
We plot two examples of hands.
In [6]:
plot_hand(first_grab_hand, bone_list)
plt.title(f"Hand: {label_to_str[0]}");

In [7]:
plot_hand(first_expand_hand, bone_list)
plt.title(f"Hand: {label_to_str[1]}");

We want to investigate if there is a difference between these two groups of shapes - grab versus expand - or if the main difference is merely relative to the global size of the landmarks’ sets.
In [8]:
ambient_dim = 3
k_landmarks = 22
preshape = PreShapeSpace(ambient_dim=ambient_dim, k_landmarks=k_landmarks)
sizes = preshape.embedding_space.metric.norm(preshape.center(hands))
plt.figure(figsize=(6, 4))
for label, col in label_to_color.items():
label_sizes = sizes[labels == label]
plt.hist(label_sizes, color=col, label=label_to_str[label], alpha=0.5, bins=10)
plt.axvline(gs.mean(label_sizes), color=col)
plt.legend(fontsize=14)
plt.title("Hands sizes", fontsize=14);

We perform a hypothesis test, testing if the two samples of sizes have the same average.
In [9]:
from scipy import stats
signif_level = 0.05
tstat, pvalue = stats.ttest_ind(sizes[labels == 0], sizes[labels == 1])
print(pvalue < signif_level)
True
The size could be a characteristic allowing to distinguish between these two specific shapes.
We want to investigate if there is a difference in shapes, where the size component has been quotiented out.
We project the data to the Kendall pre-shape space, which:
centers the hand landmark sets so that they share the same barycenter,
normalizes the sizes of the landmarks’ sets to 1.
Directly looking at the hands by looking at the coordinates of their landmarks in 3D does not show clear clusters
In [10]:
from geomstats.geometry.euclidean import Euclidean
eucl = Euclidean(dim=3 * 22)
hands_vec = hands.reshape(52, -1)
eucl_pair_dist = eucl.metric.dist_pairwise(hands_vec)
plt.figure(figsize=(4, 4))
plt.imshow(eucl_pair_dist);

We project the hands in a Kendall shape space.
In [11]:
hands_preshape = preshape.projection(hands)
print(hands_preshape.shape)
print(preshape.belongs(hands_preshape))
print(gs.isclose(preshape.embedding_space.metric.norm(hands_preshape), 1.0))
(52, 22, 3)
[ True True True True True True True True True True True True
True True True True True True True True True True True True
True True True True True True True True True True True True
True True True True True True True True True True True True
True True True True]
[ True True True True True True True True True True True True
True True True True True True True True True True True True
True True True True True True True True True True True True
True True True True True True True True True True True True
True True True True]
In order to quotient out the 3D orientation component, we align the landmark sets in the preshape space.
In [12]:
preshape.equip_with_group_action("rotations")
preshape.equip_with_quotient()
base_point = hands_preshape[0]
hands_shape = preshape.fiber_bundle.align(point=hands_preshape, base_point=base_point)
print(hands_shape.shape)
(52, 22, 3)
The Kendall metric is a Riemannian metric that takes this alignment into account. It corresponds to the metric of the Kendall shape space, which is the manifold defined as the preshape space quotient by the action of the rotation in ambient_dim dimensions, here in 3 dimensions.
We can use it to perform a tangent PCA in the Kendall shape space, and determine if we see a difference in the hand shapes.
In [13]:
from geomstats.learning.pca import TangentPCA
tpca = TangentPCA(preshape.quotient)
tpca.fit(hands_shape)
plt.figure()
plt.plot(tpca.explained_variance_ratio_)
plt.xlabel("Number of principal tangent components", size=14)
plt.ylabel("Fraction of explained variance", size=14);

The first 2 principal components capture around 60% of the variance.
In [14]:
X = tpca.transform(hands_shape)
plt.figure(figsize=(6, 6))
for label, col in label_to_color.items():
mask = labels == label
plt.scatter(X[mask, 0], X[mask, 1], color=col, s=100, label=label_to_str[label])
plt.legend(fontsize=14)
plt.title(
"Projection on the 2 first principal components"
"\nof tangent PCA in Kendall shape space",
fontsize=14,
)
plt.show()

In [15]:
dist_pairwise = preshape.quotient.metric.dist_pairwise(hands_shape)
print(dist_pairwise.shape)
(52, 52)
In [16]:
plt.figure(figsize=(4, 4))
plt.imshow(dist_pairwise);

This distance matrix can now be used to perform clustering on the hands shapes.
References#
De Smedt, H. Wannous, J.P. Vandeborre, J. Guerry, B. Le Saux, D. Filliat, SHREC’17 Track: 3D Hand Gesture Recognition Using a Depth and Skeletal Dataset, 10th Eurographics Workshop on 3D Object Retrieval, 2017. https://doi.org/10.2312/3dor.20171049